Introduction
coro_rpc is a high-performance Remote Procedure Call (RPC) framework in C++20, based on stackless coroutine and compile-time reflection. In an echo benchmark test on localhost with 96-cores cpu, it reaches a peak QPS of 20 million (in pipeline) or 4.5 million(2000 connection in ping-pong), which exceeds other RPC libraries, such as grpc and brpc. Rather than high performance, the most key feature of coro_rpc is easy to use: as a header-only library, it does not need to be compiled or installed separately. It allows building an RPC client and server with a few lines of C++ code.
The core design goal of coro_rpc is usability. Instead of exposing too many troublesome details of the underlying RPC framework, coro_rpc provides a simplifying abstraction that allows programmers to concentrate principally on business logic and implement an RPC service without much effort. Given such simplicity, coro_rpc goes back to the essence of RPC: a remote function call similar to a normal function call except for the underlying network I/O. So coro_rpc user does not need to care about the underlying networking, data serialization, and so on but focus on up-layer implementations. And coro_rpc provides simple and straightforward APIs to users. Let's see one simple demo below
Usability
server
- define the RPC function
// rpc_service.hpp
inline std::string echo(std::string str) { return str; }- regist the RPC function and start the server
#include "rpc_service.hpp"
#include <ylt/coro_rpc/coro_rpc_server.hpp>
int main() {
coro_rpc_server server(/*thread_num =*/10, /*port =*/9000);
server.register_handler<echo>(); // register rpc function
server.start(); // start the server and blocking wait
}Basically one could build a RPC server in 5~6 lines by defining the rpc function and starting the server, without too much details to be worried about. Now let see how a RPC client works.
An RPC client has to connect to the server and then call the remote method.
#include "rpc_service.hpp"
#include <ylt/coro_rpc/coro_rpc_client.hpp>
Lazy<void> test_client() {
coro_rpc_client client;
co_await client.connect("localhost", /*port =*/"9000");
auto r = co_await client.call<echo>("hello coro_rpc"); // call the method with parameters
std::cout << r.result.value() << "\n"; //will print "hello coro_rpc"
}
int main() {
syncAwait(test_client());
}As demonstrated above, it is also very convenient to build a client. There's not much difference between an RPC function call with a local function one: simply provides the function name and parameters.
The server/client implementation shows the usability and core features of coro_rpc. Also, it shows us the core concept of RPC: that users can invoke remote methods in a way with local functions, and users will focus their efforts on RPC functions.
Another usability of coro_rpc is that: there are barely any constraints on the RPC function itself. One could define an RPC function with any number of parameters. The parameters' type should be legal for struct_pack. (See struct pack type system). The serialization/deserialization procedures are transparent to users and the RPC framework will take care of them automatically.
RPC with any parameters
// rpc_service.h
// client needs to include this header and the implementation details are hidden
void hello(){};
int get_value(int a, int b){return a + b;}
struct person {
int id;
std::string name;
int age;
};
person get_person(person p, int id);
struct dummy {
std::string echo(std::string str) { return str; }
};
// rpc_service.cpp
#include "rpc_service.h"
int get_value(int a, int b){return a + b;}
person get_person(person p, int id) {
p.id = id;
return p;
}And in server, we define the following:
#include "rpc_service.h"
#include <ylt/coro_rpc/coro_rpc_server.hpp>
int main() {
coro_rpc_server server(/*thread_num =*/10, /*port =*/9000);
server.register_handler<hello, get_value, get_person>();//register the RPC functions of any signature
dummy d{};
server.register_handler<&dummy::echo>(&d); //register the member functions
server.start(); // start the server
}In client, we have the following:
# include "rpc_service.h"
# include <coro_rpc/coro_rpc_client.hpp>
Lazy<void> test_client() {
coro_rpc_client client;
co_await client.connect("localhost", /*port =*/"9000");
//RPC invokes
co_await client.call<hello>();
co_await client.call<get_value>(1, 2);
person p{};
co_await client.call<get_person>(p, /*id =*/1);
auto r = co_await client.call<&dummy::echo>("hello coro_rpc");
std::cout << r.result.value() << "\n"; //will print "hello coro_rpc"
}
int main() {
syncAwait(test_client());
}The input parameter and return type of get_person is a struct. The serialization/deserialization are automatically done by library struct_pack with compile-time reflection. Users are not required to take efforts on such procedures.
Compare with grpc/brpc
Usability
| RPC | Define DSL | support coroutine | code lines of hello world | external dependency | header-only |
|---|---|---|---|---|---|
| grpc | Yes | No | 70+ helloworld | 16 | No |
| brpc | Yes | No | 40+ helloworld | 6 | No |
| coro_rpc | No | Yes | 9 | 3 | Yes |
Asynchronous Model
Asynchronous callback VS. coroutine
- grpc asynchronous client
//<https://github.com/grpc/grpc/blob/master/examples/cpp/helloworld/greeter_callback_client.cc>
std::string SayHello(const std::string& user) {
// Data we are sending to the server.
HelloRequest request;
request.set_name(user);
// Container for the data we expect from the server.
HelloReply reply;
// Context for the client. It could be used to convey extra information to
// the server and/or tweak certain RPC behaviors.
ClientContext context;
// The actual RPC.
std::mutex mu;
std::condition_variable cv;
bool done = false;
Status status;
stub_->async()->SayHello(&context, &request, &reply,
[&mu, &cv, &done, &status](Status s) {
status = std::move(s);
std::lock_guard<std::mutex> lock(mu);
done = true;
cv.notify_one();
});
std::unique_lock<std::mutex> lock(mu);
while (!done) {
cv.wait(lock);
}
// Act upon its status.
if (status.ok()) {
return reply.message();
} else {
std::cout << status.error_code() << ": " << status.error_message()
<< std::endl;
return "RPC failed";
}
}- brpc asynchronous client
// <https://github.com/apache/incubator-brpc/blob/master/example/asynchronous_echo_c%2B%2B/client.cpp>
void HandleEchoResponse(
brpc::Controller*cntl,
example::EchoResponse* response) {
// std::unique_ptr makes sure cntl/response will be deleted before returning.
std::unique_ptr<brpc::Controller> cntl_guard(cntl);
std::unique_ptr<example::EchoResponse> response_guard(response);
if (cntl->Failed()) {
LOG(WARNING) << "Fail to send EchoRequest, " << cntl->ErrorText();
return;
}
LOG(INFO) << "Received response from " << cntl->remote_side()
<< ": " << response->message() << " (attached="
<< cntl->response_attachment() << ")"
<< " latency=" << cntl->latency_us() << "us";
}
int main() {
example::EchoService_Stub stub(&channel);
// Send a request and wait for the response every 1 second.
int log_id = 0;
while (!brpc::IsAskedToQuit()) {
// Since we are sending asynchronous RPC (`done' is not NULL),
// these objects MUST remain valid until `done' is called.
// As a result, we allocate these objects on heap
example::EchoResponse* response = new example::EchoResponse();
brpc::Controller* cntl = new brpc::Controller();
// Notice that you don't have to new request, which can be modified
// or destroyed just after stub.Echo is called.
example::EchoRequest request;
request.set_message("hello world");
cntl->set_log_id(log_id ++); // set by user
if (FLAGS_send_attachment) {
// Set attachment which is wired to network directly instead of
// being serialized into protobuf messages.
cntl->request_attachment().append("foo");
}
// We use protobuf utility `NewCallback' to create a closure object
// that will call our callback `HandleEchoResponse'. This closure
// will automatically delete itself after being called once
google::protobuf::Closure* done = brpc::NewCallback(
&HandleEchoResponse, cntl, response);
stub.Echo(cntl, &request, response, done);
// This is an asynchronous RPC, so we can only fetch the result
// inside the callback
sleep(1);
}
}- coro_rpc client with coroutine
# include <coro_rpc/coro_rpc_client.hpp>
Lazy<void> say_hello() {
coro_rpc_client client;
co_await client.connect("localhost", /*port =*/"9000");
while (true){
auto r = co_await client.call<echo>("hello coro_rpc");
assert(r.result.value() == "hello coro_rpc");
}
}One core feature of coro_rpc is stackless coroutine where users could write asynchronous code in a synchronous manner, which is more simple and easy to understand.
Benchmark
System Configuration
Processor:Intel(R) Xeon(R) Platinum 8163 CPU @2.50GHz 96Cores
OS: Linux version 4.9.151-015.ali3000.alios7.x86_64
Compiler:Alibaba Clang13 C++20
Test case
Both the client and server are on the same machine, sending requests using different amounts of connections to do echo tests.
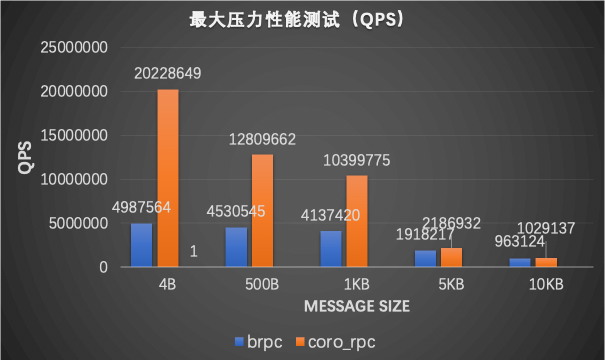
Peak QPS test
- Send data and receive data through a pipeline, put CPU under full load and get the highest qps
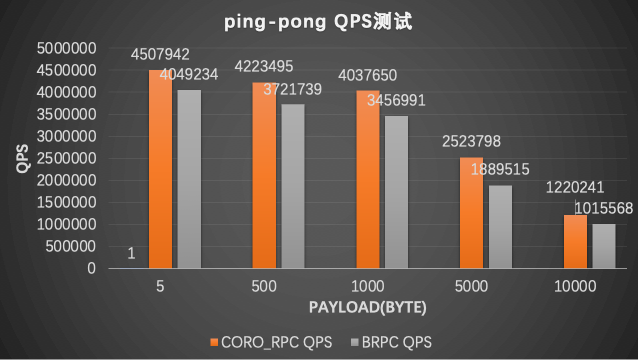
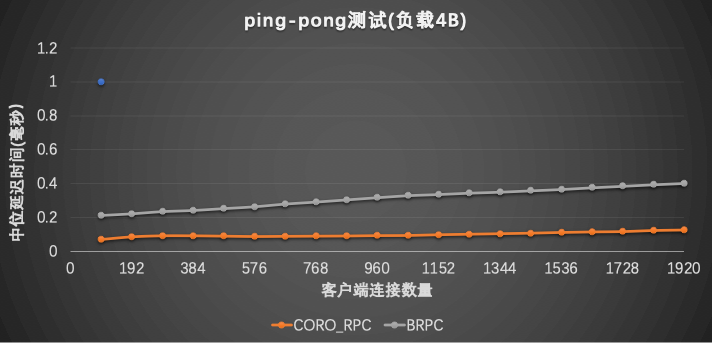
ping-pong test
- send the next request after the previous one is completed
- check the QPS as the number of connections increases.
- get the average latency of ping-pong
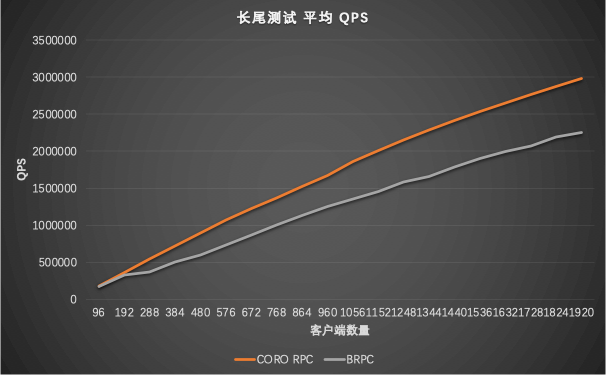
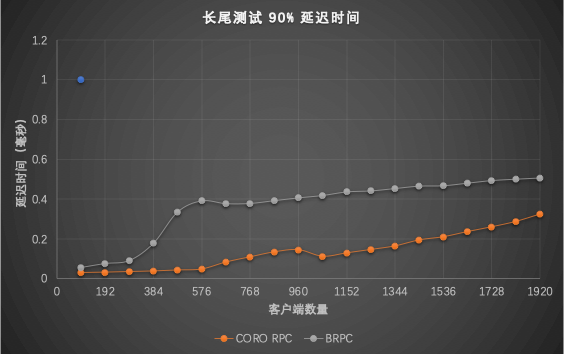
long-tail test
Notes on benchmark test
- grpc's QPS does not exceed 100,000, so it is not included in this benchmarking.
- The client is a coro_rpc based client for both coro_rpc and brpc stress test. It has better stress test performance compared to a brpc client(With a brpc client, the brpc client will drop 50%).
- brpc uses connection multiplexing, The actual number of socket connections is not that high(96)
Known Limitations
- Only little-endian is supported for now. Big-endian is working in progress
- Only C++ is supported and could not work across languages now, will support other languages later; Compiler should support C++20(clang13, gcc10.2, msvc2022)
- If any compile issue with
gcc -O3, please try option-fno-tree-slp-vectorize