coro_rpc简介
coro_rpc是用C++20开发的基于无栈协程和编译期反射的高性能的rpc库,在96核cpu的单机上echo测试qps达到2000万(pipeline模式)或450万(ping-pong模式,2000连接)(详情见benchmark部分) ,性能远高于grpc和brpc等rpc库。然而高性能不是它的主要特色,coro_rpc的主要特色是易用性,免安装,包含头文件就可以用,几行代码就可以完成一个rpc服务器和客户端。
coro_rpc的设计理念是:以易用性为核心,回归rpc本质,让用户专注于业务逻辑而不是rpc框架细节,几行代码就可以完成rpc开发。 rpc的本质是什么?rpc的本质就是一个远程函数,除了rpc底层的网络IO之外,其它的就和普通函数一样。用户不需要关注rpc底层的网络IO、路由、序列化等细节,用户只需要专注于rpc函数的业务逻辑即可,这就是coro_rpc的设计理念, 正是基于这一设计理念,coro_rpc提供了非常简单易用的API给用户使用。通过一个例子来看看coro_rpc的易用性如何。
coro_rpc的易用性
rpc_server端
1.定义rpc函数
// rpc_service.hpp
inline std::string_view echo(std::string_view str) { return str; }2.注册rpc函数和启动server
#include "rpc_service.hpp"
#include <ylt/coro_rpc/coro_rpc_server.hpp>
using namespace coro_rpc;
int main() {
// 初始化服务器
coro_rpc_server server(/*thread_num =*/10, /*port =*/9000);
server.register_handler<echo>(); // 注册rpc函数
server.start(); // 启动server并阻塞等待
}对于rpc服务端来说,用户只需要定义rpc函数再启动server即可,不需要关注其它细节,5,6行代码就可以提供一个rpc服务了,是不是很简单!再来看看client是怎么调用hello这个rpc服务的。 rpc_client端
- 连接服务端
- rpc调用
#include "rpc_service.hpp"
#include <ylt/coro_rpc/coro_rpc_client.hpp>
using namespace coro_rpc;
using namespace async_simple::coro;
Lazy<void> test_client() {
coro_rpc_client client;
co_await client.connect("localhost", /*port =*/"9000");
auto r = co_await client.call<echo>("hello coro_rpc"); //传参数调用rpc函数
std::cout << r.result.value() << "\n"; //will print "hello coro_rpc"
}
int main() {
syncAwait(test_client());
}client调用rpc函数也同样简单,5,6行代码就可以实现rpc调用了。 就像调用本地函数一样调用远程rpc函数,在call里面输入函数名字和参数就可以实现远程调用了,非常简单。
相信上面的这个简单的例子已经充分展示了coro_rpc的易用性和特点了,也体现了rpc的本质,即用户可以像调用本地函数那样调用远程函数,用户只需要关注rpc函数的业务逻辑即可。
和grpc、brpc比较易用性
rpc易用性比较
| RPC | 是否需要定义DSL | 是否支持协程 | hello world例子代码行数 | 依赖库 | 是否header only |
|---|---|---|---|---|---|
| grpc | Yes | No | 70+ helloworld | 16 | No |
| brpc | Yes | No | 40+ helloworld | 6 | No |
| coro_rpc | No | Yes | 9 | 3 | Yes |
异步编程模型比较
异步回调 vs 协程 grpc异步回调
//<https://github.com/grpc/grpc/blob/master/examples/cpp/helloworld/greeter_callback_client.cc>
std::string SayHello(const std::string& user) {
// Data we are sending to the server.
HelloRequest request;
request.set_name(user);
// Container for the data we expect from the server.
HelloReply reply;
// Context for the client. It could be used to convey extra information to
// the server and/or tweak certain RPC behaviors.
ClientContext context;
// The actual RPC.
std::mutex mu;
std::condition_variable cv;
bool done = false;
Status status;
stub_->async()->SayHello(&context, &request, &reply,
[&mu, &cv, &done, &status](Status s) {
status = std::move(s);
std::lock_guard<std::mutex> lock(mu);
done = true;
cv.notify_one();
});
std::unique_lock<std::mutex> lock(mu);
while (!done) {
cv.wait(lock);
}
// Act upon its status.
if (status.ok()) {
return reply.message();
} else {
std::cout << status.error_code() << ": " << status.error_message()
<< std::endl;
return "RPC failed";
}
}brpc异步回调
// <https://github.com/apache/incubator-brpc/blob/master/example/asynchronous_echo_c%2B%2B/client.cpp>
void HandleEchoResponse(
brpc::Controller*cntl,
example::EchoResponse* response) {
// std::unique_ptr makes sure cntl/response will be deleted before returning.
std::unique_ptr<brpc::Controller> cntl_guard(cntl);
std::unique_ptr<example::EchoResponse> response_guard(response);
if (cntl->Failed()) {
LOG(WARNING) << "Fail to send EchoRequest, " << cntl->ErrorText();
return;
}
LOG(INFO) << "Received response from " << cntl->remote_side()
<< ": " << response->message() << " (attached="
<< cntl->response_attachment() << ")"
<< " latency=" << cntl->latency_us() << "us";
}
int main() {
example::EchoService_Stub stub(&channel);
// Send a request and wait for the response every 1 second.
int log_id = 0;
while (!brpc::IsAskedToQuit()) {
// Since we are sending asynchronous RPC (`done' is not NULL),
// these objects MUST remain valid until `done' is called.
// As a result, we allocate these objects on heap
example::EchoResponse* response = new example::EchoResponse();
brpc::Controller* cntl = new brpc::Controller();
// Notice that you don't have to new request, which can be modified
// or destroyed just after stub.Echo is called.
example::EchoRequest request;
request.set_message("hello world");
cntl->set_log_id(log_id ++); // set by user
if (FLAGS_send_attachment) {
// Set attachment which is wired to network directly instead of
// being serialized into protobuf messages.
cntl->request_attachment().append("foo");
}
// We use protobuf utility `NewCallback' to create a closure object
// that will call our callback `HandleEchoResponse'. This closure
// will automatically delete itself after being called once
google::protobuf::Closure* done = brpc::NewCallback(
&HandleEchoResponse, cntl, response);
stub.Echo(cntl, &request, response, done);
// This is an asynchronous RPC, so we can only fetch the result
// inside the callback
sleep(1);
}
}coro_rpc协程
客户端:
std::string_view echo(std::string_view);
#include <coro_rpc/coro_rpc_client.hpp>
Lazy<void> say_hello(){
coro_rpc_client client;
co_await client.connect("localhost", /*port =*/"9000");
while (true){
auto r = co_await client.call<echo>("hello coro_rpc");
assert(r.result.value() == "hello coro_rpc");
}
}服务端:
std::string_view echo(std::string_view sv) {
return sv;
}
void start() {
coro_rpc_server server(/*thread num = */10,/* listen port = */9000);
server.register_handler<echo>();
server.start();
}coro_rpc的一大特色就是支持无栈协程,让用户以同步方式编写异步代码,简洁易懂!
benchmark
测试环境
硬件: Intel(R) Xeon(R) Platinum 8163 CPU @ 2.50GHz 96核
OS: Linux version 4.9.151-015.ali3000.alios7.x86_64
编译器:Alibaba Clang13 C++20
测试case
客户端和服务端都在同一台机器上,使用不同连接数发送请求做echo测试。
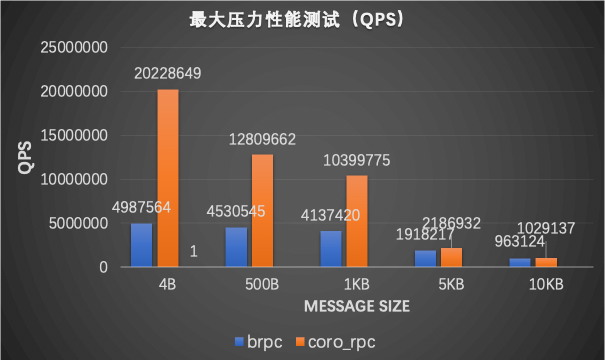
极限qps测试
- 通过pipline发送数据和接收数据,把cpu打满后得到最高qps
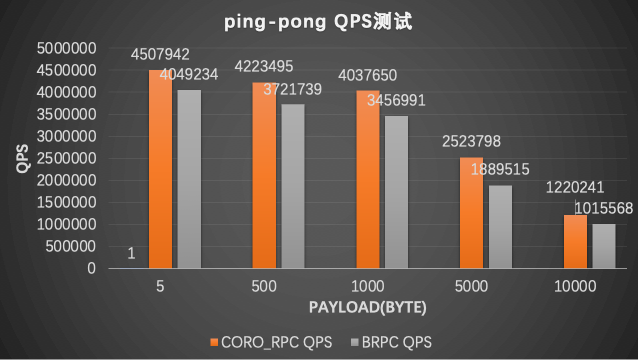
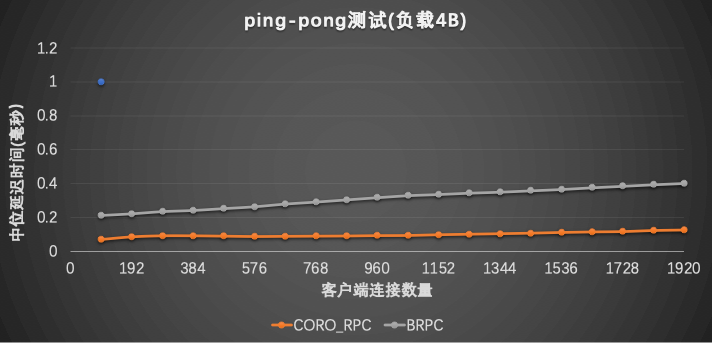
ping-pong测试
- 请求和响应完成之后再发下一次请求,测试该场景下的qps;
- 测试连接数不断增多时qps的变化;
- 测量ping-pong的平均延时
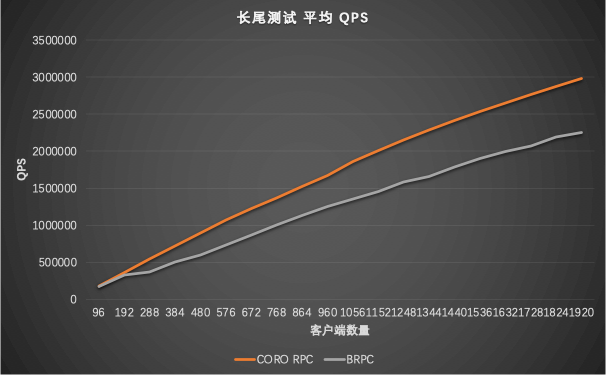
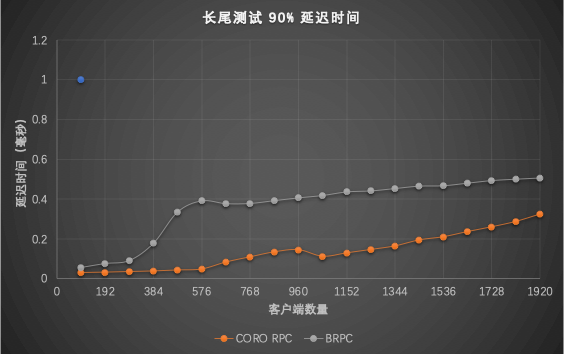
长尾测试
- 1%慢请求(异步等待50ms)下qps和延时
benchmark备注
- grpc的qps始终不会超过10万,故没有放进来做性能比较;
- 测试客户端统一用coro_rpc的压测客户端测试,压测效果较好,基本能把cpu打满。没有使用brpc测试客户端原因是:如果用brpc客户端压测,brpc的qps会降低一倍。
- brpc由于采用了连接复用,实际上的socket连接数并没有那么多(实际连接数为96),coro_rpc的连接数是实际的连接数。
使用约束
- 目前只支持小端,兼容大端的工作正在做;
- 目前只支持C++,暂时还不支持跨语言;编译器要求能支持C++20(clang13, gcc10.2, msvc2022);
- gcc如果在O3下出现链接失败,请开启选项-fno-tree-slp-vectorize以禁用该优化选项。